SERIA DE GRIPERE ELECTRICE HITBOT – Grip electric de tip lat Z-EFG-40-100



Categorie principală
Braț robotic industrial / Braț robotic colaborativ / Gripper electric / Actuator inteligent / Soluții de automatizare
Aplicație
Gripperele robotizate SCIC din seria Z-EFG sunt de dimensiuni reduse și au un sistem servo încorporat, care permite obținerea unui control precis al vitezei, poziției și forței de prindere. Sistemul de prindere SCIC de ultimă generație pentru soluții de automatizare vă va permite să deschideți noi posibilități de automatizare a sarcinilor pe care nu le-ați fi crezut niciodată posibile.

Caracteristică

· Forță mare de strângere, autoblocare mecanică
· Cursă reglabilă, forță de prindere reglabilă
·Durată lungă de viață: zeci de milioane de cicluri, depășind ghearele de aer
·Controler încorporat: dimensiuni reduse, integrare ușoară
·Mod de control: 485 (Modbus RTU), I/O
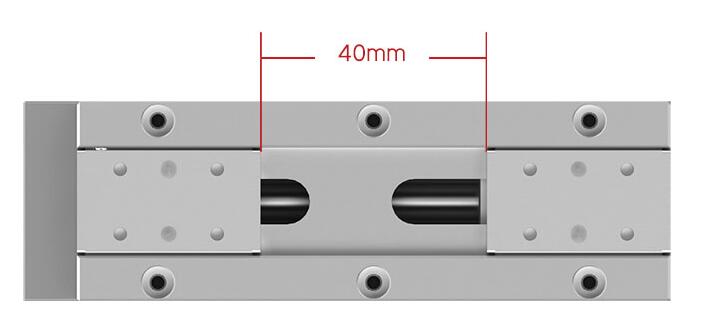
Cursă 40 mm, Forță de strângere 100 N, Autoblocare mecanică, Fără coborâre după oprirea alimentării
Accident vascular cerebral mare
Cursa totală este reglabilă la 40 mm
Forță de strângere
40-100N, greutate de prindere recomandată ≤1kg
Autoblocare mecanică
Autoblocare mecanică, fără coborâre chiar dacă alimentarea este oprită
Controlerul este încorporat
Acoperire pentru camere mici, ușor de integrat.
Reacție rapidă
Cel mai scurt timp pentru o singură cursă este de doar 0,4 secunde
Durată lungă de viață
Zeci de milioane de cicluri, dincolo de un clește pneumatic

● Promovarea unei revoluții în înlocuirea cleștelor pneumatice cu clește electrice, primul clește electric cu sistem servo integrat din China.
● Înlocuitor perfect pentru compresorul de aer + filtrul + electrovalva + supapa de accelerație + dispozitiv de prindere pneumatic
● Durată de viață cu cicluri multiple, în concordanță cu cilindrul japonez tradițional



Parametru de specificație
| Nr. model Z-EFG-40-100 | Parametri |
| Accident vascular cerebral total | 40 mm reglabil |
| Forța de prindere | Reglabil 40-100N |
| Repetabilitate | ±0,02 mm |
| Greutate de prindere recomandată | ≤1 kg |
| Mod de transmisie | Cremalieră + ghidaj sferic |
| Reumplerea cu vaselină a componentelor mobile | La fiecare șase luni sau 1 milion de mișcări / oră |
| Timpul de mișcare a cursei într-o singură direcție | 0,4 secunde |
| Mod de mișcare | Două degete se mișcă pe orizontală |
| Greutate | 1 kg |
| Dimensiuni (L*l*Î) | 85*37*120mm |
| Tensiune de funcționare | 24V±10% |
| Curent nominal | 0,5A |
| Curent de vârf | 4A |
| Putere | 12W |
| Clasa de protecție | IP20 |
| Tipul motorului | DC fără perii |
| Intervalul de temperatură de funcționare | 5-55℃ |
| Interval de umiditate de funcționare | RH35-80 (Fără îngheț) |
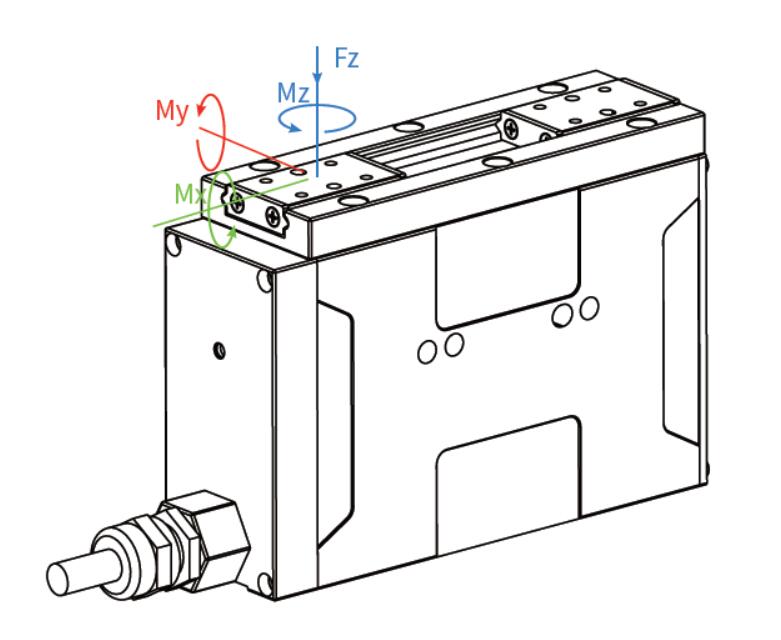
| Sarcină statică admisibilă pe direcție verticală | |
| Fz: | 200N |
| Cuplu admisibil | |
| Mx: | 8 Nm |
| Mele: | 6,1 Nm |
| Mz: | 6,1 Nm |
Controlul forței de precizie, repetabilitate ridicată

Gripperul electric Z-EFG-40-100 are un design special al transmisiei și un algoritm de compensare a acționării, cursa totală este de 40 mm, forța de strângere este de 40-100 N, cursa și forța sunt reglabile, iar repetabilitatea este de ± 0,02 mm.

Reacție rapidă, mai rapidă și mai stabilă

Gripperul electric adoptă modul de transmisie cu tijă șurub + curea de distribuție + ghidaj cu bilă, cel mai scurt timp de cursă fiind de doar 0,4 secunde, ceea ce poate satisface cerințele de prindere ale liniei de producție.
Ocupând o suprafață mică, convenabil pentru integrare

Gripperul electric folosește două degete paralele, dimensiunile sale sunt L85*l37*Î120mm, structura sa este compactă, suportând peste 5 moduri de instalare, controlerul este încorporat, ocupând un spațiu mic, ceea ce facilitează gestionarea diverselor sarcini de prindere.


Acționare integrată și controler cu prindere ușoară

Capătul terminal al Z-EFG-40-100 poate fi schimbat cu ușurință, greutatea sa de prindere este ≤1 kg, clientul putând proiecta piesele coadei în funcție de obiectele de prindere, pentru a garanta că cleștele electric îndeplinește sarcina de prindere în cea mai mare măsură.
Moduri de control multiple, ușor de utilizat

Configurația gripperului electric Z-EFG-40-100 este simplă, dispunând de numeroase moduri de control, inclusiv 485 (Modbus RTU), Pulse, I/O, compatibile cu sistemul principal de control PLC.

Decalajul centrului de greutate al încărcăturii
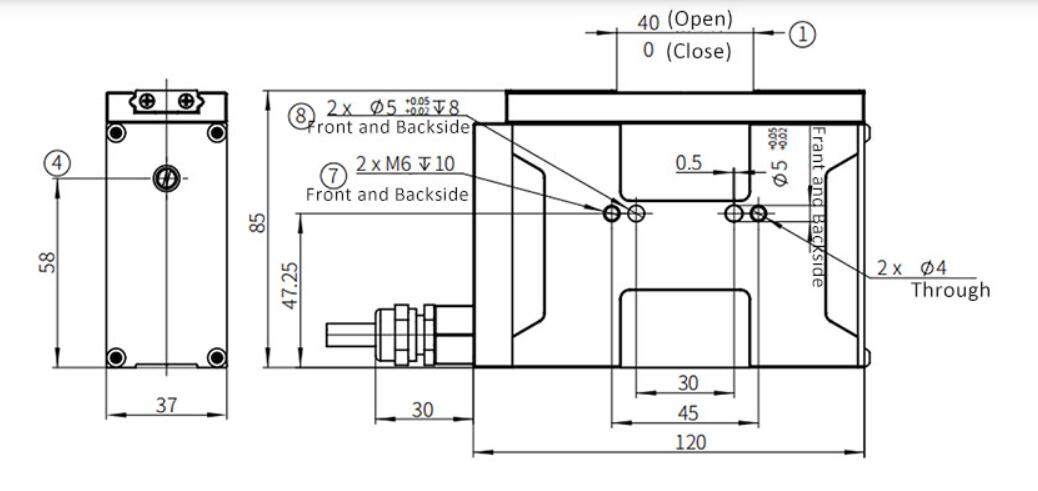
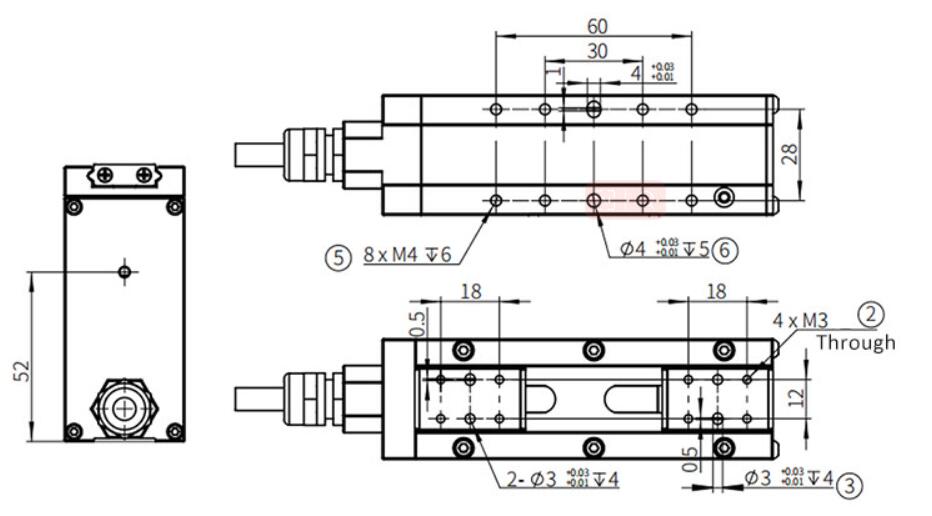
1) Cursa cleștelui electric
2) Locul de instalare (gaură filetată)
3) Locul de instalare (gaură de știft)
4) Poziția de deschidere și închidere a mâinii
5) Locul de instalare inferior (gaură filetată)
6) Locul de instalare inferior (gaură de știft)
7) Locul de instalare pe flanc (gaură de știft)
8) Locul de instalare pe flanc (gaură filetată)
Afacerea noastră


Categorii de produse
-

SERIA HITBOT ELECTRIC GRIPPER – Z-EFG-50 Paral...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER SERIA RGI –...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER SERIA PGC –...
-

SERIA DE GRIPERE ELECTRICE HITBOT – Z-EMG-4 Parall...
-

SERIA DE GRIPERE ELECTRICE HITBOT – Z-EFG-20S Para...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER SERIA RGD –...