SERIA CU SCHIMBĂTOR RAPID – QCA-25 Un dispozitiv cu schimbare rapidă la capătul unui robot



Categorie principală
Schimbător de scule robotizat / Schimbător de scule la capătul brațului (EOAT) / Sistem de schimbare rapidă / Schimbător automat de scule / Interfață scule robotizate / Partea robotului / Partea prinderei / Flexibilitate scule / Eliberare rapidă / Schimbător pneumatic de scule / Schimbător electric de scule / Schimbător hidraulic de scule / Schimbător de scule de precizie / Mecanism de blocare de siguranță / Efector final / Automatizare / Eficiență schimbare scule / Schimb scule / Automatizare industrială / Scule robotizate la capătul brațului / Design modular
Aplicație
Sculele de capăt de braț (EOAT) sunt utilizate pe scară largă în industrii precum producția de automobile, electronica 3C, logistica, turnarea prin injecție, ambalarea alimentelor și farmaceuticelor și prelucrarea metalelor. Funcțiile sale principale includ manipularea pieselor de prelucrat, sudarea, pulverizarea, inspecția și schimbarea rapidă a sculelor. EOAT îmbunătățește semnificativ eficiența producției, flexibilitatea și calitatea produselor, ceea ce le face o parte esențială a automatizării industriale moderne.
Caracteristică
De înaltă precizie
Partea de prindere a pistonului de reglare joacă rolul de poziționare, ceea ce asigură o precizie ridicată de poziționare repetată. Testele pe un milion de cicluri arată că precizia reală este mult mai mare decât valoarea recomandată.
Rezistență ridicată
Pistonul de blocare cu diametru mare al cilindrului are o forță de blocare puternică, iar dispozitivul rapid SCIC are o capacitate anti-cuplu puternică. La blocare, nu vor exista vibrații din cauza mișcării de mare viteză, evitând astfel defecțiunile de blocare și asigurând precizia poziționării repetate.
Performanță ridicată
Mecanismul de blocare cu design multi-conic al suprafeței, componentele de etanșare cu durată lungă de viață și sonda de contact elastică de înaltă calitate sunt adoptate pentru a asigura contactul strâns al modulului de semnal.



Parametru de specificație
| Seria cu schimbare rapidă | ||||
| Model | Sarcină utilă maximă | Calea gazului | Forță de blocare la 80 Psi (5,5 Bar) | Greutatea produsului |
| QCA-05 | 5 kg | 6-M5 | 620N | 0,4 kg |
| QCA-05 | 5 kg | 6-M5 | 620N | 0,3 kg |
| QCA-15 | 15 kg | 6-M5 | 1150N | 0,3 kg |
| QCA-25 | 25 kg | 12-M5 | 2400N | 1,0 kg |
| QCA-35 | 35 kg | 8-G1/8 | 2900N | 1,4 kg |
| QCA-50 | 50 kg | 9-G1/8 | 4600N | 1,7 kg |
| QCA-S50 | 50 kg | 8-G1/8 | 5650N | 1,9 kg |
| QCA-100 | 100 kg | 7-G3/8 | 12000N | 5,2 kg |
| QCA-S100 | 100 kg | 5-G3/8 | 12000N | 3,7 kg |
| QCA-S150 | 150 kg | 8-G3/8 | 12000N | 6,2 kg |
| QCA-200 | 300 kg | 12-G3/8 | 16000N | 9,0 kg |
| QCA-200D1 | 300 kg | 8-G3/8 | 16000N | 9,0 kg |
| QCA-S350 | 350 kg | / | 31000N | 9,4 kg |
| QCA-S500 | 500 kg | / | 37800N | 23,4 kg |

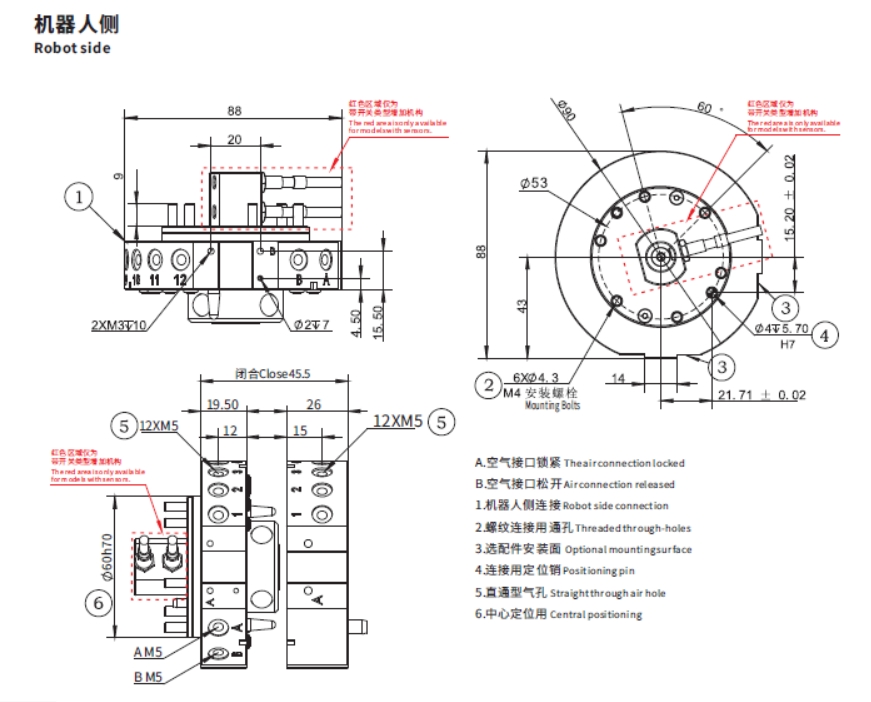
Partea robotului

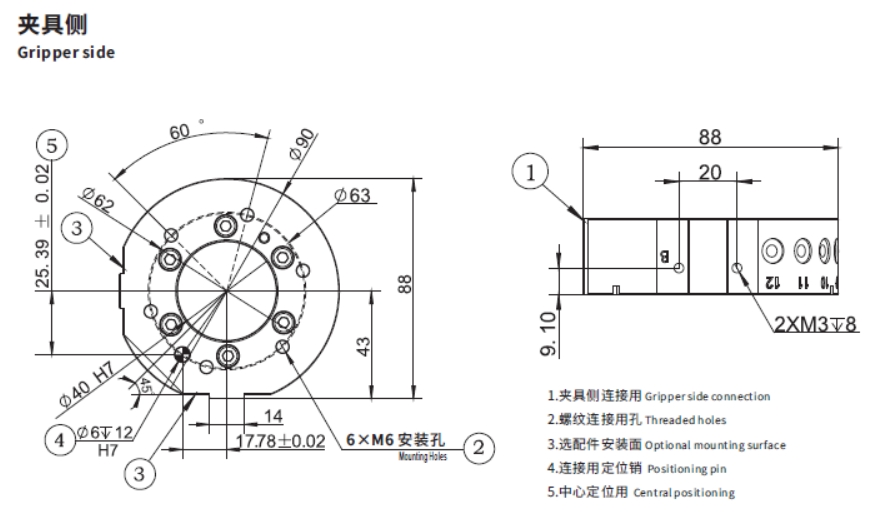
Partea cleștelui

Comutator curea laterală robot
Modul aplicabil
Tipul modulului
| Nume produs | Model | PN | Tensiune de lucru | Curent de lucru | Conector | Conector PN |
| Modul de semnalizare laterală a robotului | QCSM-15R1 | 7.Y00965 | 24V | 2,5A | DB15R1-10001. | 1.Y10163 |
| Modul de semnalizare laterală pentru clește | QCSM-15G1 | 7.Y00966 | 24V | 2,5A | DB15G1-10001. | 1.Y10437 |
①Lungimea cablului este de 1 metru
Modul HF - linie dreaptă de ieșire
| Nume produs | Model | PN |
| Modul de înaltă frecvență pe partea robotului | QCHFM-02R-1000 | 7.Y02086 |
| Modul de înaltă frecvență pe partea prinzătoarei | QCHFM-02G-1000 | 7.Y02087 |
Modul electric cu 15 fire - linie dreaptă
| Nume produs | Model | PN |
| Modul electric cu 15 fire pe partea robotului | QCHFM-15R1-1000 | 7.Y02097 |
| Modul electric cu 15 fire pe partea de prindere | QCHFM-15G1-1000 | 7.Y02098 |
Modul de alimentare - linie dreaptă de ieșire
| Nume produs | Model | PN |
| Modul de înaltă frecvență pe partea robotului | QCSM-08R-1000 | 7.Y02084 |
| Modul de înaltă frecvență pe partea prinzătoarei | QCSM-08G-1000 | 7.Y02085 |
Interfață cablu de rețea RJ45S
| Nume produs | Model | PN |
| Modul servo RJ455 pe partea robotului | QCSM-RJ45*5M-06R | 7.Y02129 |
| Modul servo RJ455 pe partea prinzătoarei | QCSM-RJ45*5M-06G | 7.Y02129 |
Afacerea noastră


Categorii de produse
-

DH ROBOTICS SERVO ELECTRIC GRIPPER SERIA RGI –...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER SERIA PGE –...
-

SERIA SCHIMBĂTOR RAPID – QCA-100 Un schimbător rapid...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER SERIA PGE –...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER SERIA RGD –...
-

SERIA DE MODULE DE PRESIUNE – FPT Trei degete...