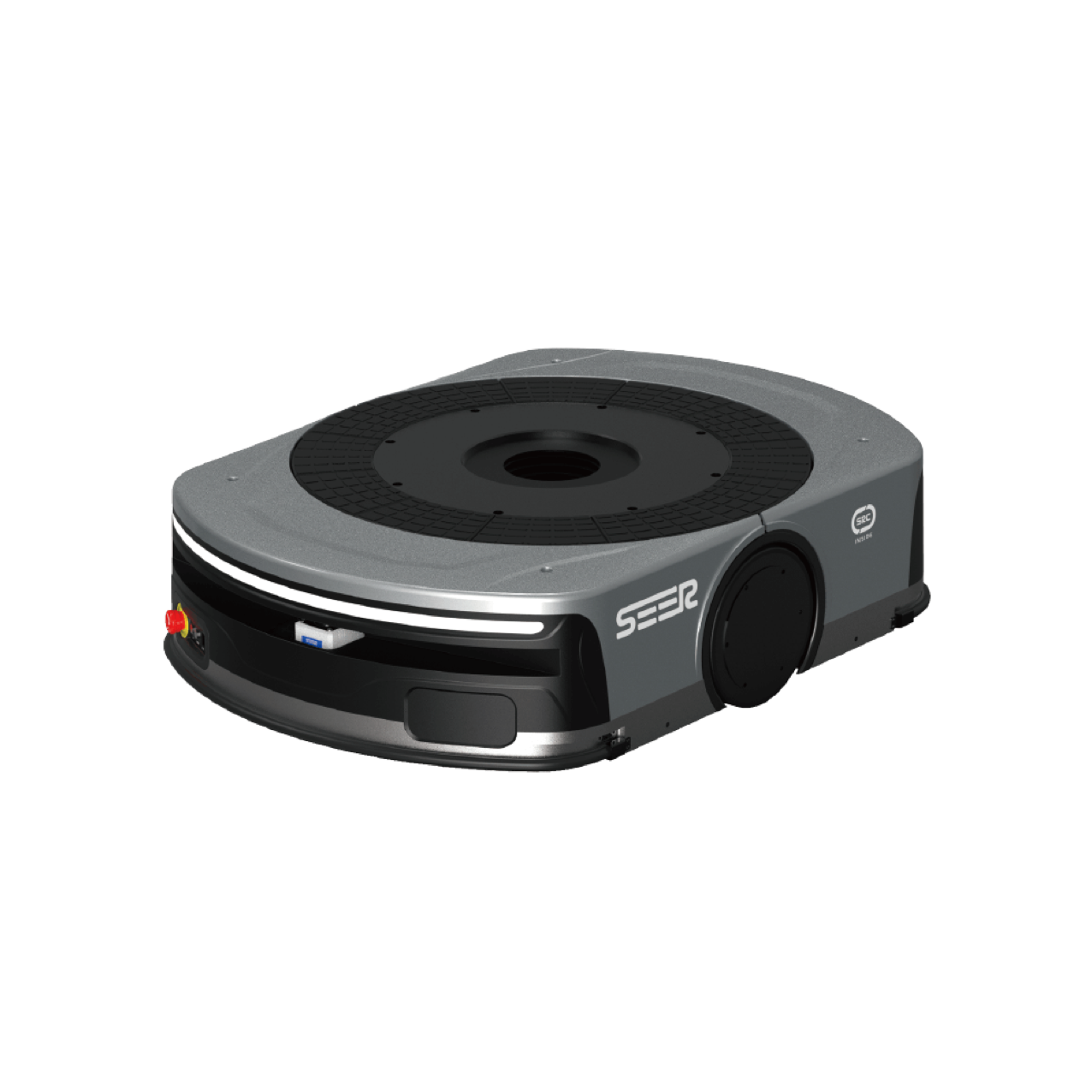
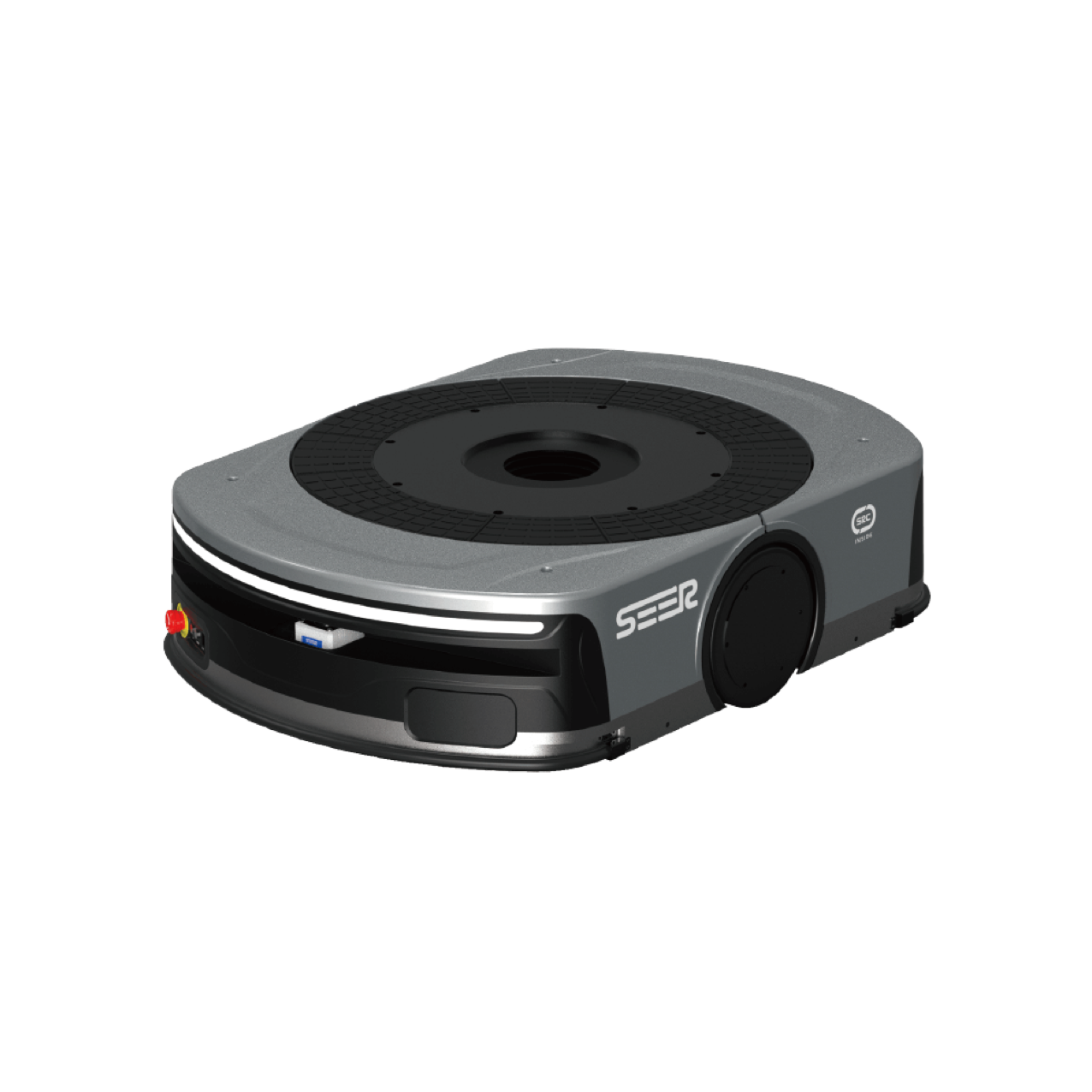
ROBOȚI DE RIDICARE CU CRIC – Robot de ridicare rotativ AMB-800K

Categorie principală
AGV AMR / ridicare cu cric AGV AMR / vehicul ghidat automat AGV / robot mobil autonom AMR / mașină AGV AMR pentru manipularea materialelor industriale / producător chinezesc robot AGV / depozit AMR / ridicare cu cric AMR navigație laser SLAM / robot mobil AGV AMR / șasiu AGV AMR navigație laser SLAM / robot logistic inteligent
Aplicație

Șasiul fără pilot din seria AMB (Auto Mobile Base) pentru vehicule autonome AGV este un șasiu universal conceput pentru vehicule ghidate autonome AGV, care oferă funcții precum editarea hărților și navigarea prin localizare. Acest șasiu fără pilot pentru cărucioare AGV oferă o gamă largă de interfețe, cum ar fi I/O și CAN, pentru montarea diverselor module superioare, împreună cu software client puternic și sisteme de dispecerizare, pentru a ajuta utilizatorii să finalizeze rapid fabricarea și aplicarea vehiculelor autonome AGV. Există patru orificii de montare în partea superioară a șasiului fără pilot din seria AMB pentru vehicule ghidate autonome AGV, care permite extinderea arbitrară cu ridicare cu cricuri, role, manipulatoare, tracțiune latentă, afișare etc. pentru a realiza aplicații multiple ale unui singur șasiu. AMB, împreună cu SEER Enterprise Enhanced Digitalization, poate realiza dispecerizarea și implementarea unificată a sute de produse AMB în același timp, ceea ce îmbunătățește considerabil nivelul inteligent de logistică internă și transport în fabrică.
Caracteristică
· Sarcină nominală: 800 kg
· Durată: 8 ore
· Număr Lidar: 1
· Diametru de rotație: 980 mm
· Viteză de navigare: ≤1,8 m/s
· Precizie de poziționare: ±5, ±0,5 mm
● Corp mai subțire pentru mai multe scenarii de transport pe raft
Are doar 245 mm înălțime pentru a fi folosit mai mult pe rafturi.
● Rotație la 360°, flexibilă pentru preluare, depunere și transport
Direcția corpului robotului și a bunurilor ridicate cu cricul pot fi controlate pentru a gestiona cu ușurință spațiile înguste, zonele cu rafturi dense și așa mai departe.
Precizia de navigare poate ajunge la ±5 mm. Acceptă mai multe metode de navigare, cum ar fi SLAM, cod QR și navigare cu reflector, pentru a satisface diverse cerințe în diferite scenarii.
● Capacitate de încărcare de 800 kg pentru transport ușor
Capacitate de încărcare de 800 kg pentru transportul de încărcături într-o varietate de scenarii, inclusiv picking pentru comerț electronic, transfer de materiale, livrare prin apel și alte producții.
● Viteză de rulare de 2,2 m/s, mai rapidă și mai eficientă
Încărcare completă cu o viteză maximă de rulare de 1,8 m/s și fără sarcină cu o viteză maximă de rulare de 2,2 m/s. Ridicare/depunere rapidă a mărfurilor în 2,5±0,5 s.



Parametru de specificație
| Numele produsului | AMB-300JZ | AMB-JS | AMB-800K | |
| ASICparametri | Metoda de navigare | SLAM cu laser | SLAM cu laser | SLAM cu laser |
| Mod de condus | Diferențial pe două roți | Diferențial pe două roți | Diferențial pe două roți | |
| Culoarea cochiliei | Gri rece | Gri rece | Negru și gri | |
| L*l*Î (mm) | 792*580*250 | 1330*952*290 | 980*680*245 | |
| Diametrul de rotație (mm) | 910 | 1460 | 980 | |
| Greutate (cu baterie) (kg) | 150 | 265 | 150 | |
| Capacitate de încărcare (kg) | 300 | 500/1000 | 800 | |
| Dimensiunile platformei de ridicare cu cric (mm) | 760*545 | 1300*920 | φ640 | |
| Înălțimea maximă de ridicare cu cricul (mm) | 60±2 | 60±1 | 60±2 | |
| Performanţă parametri | Lățime minimă admisibilă (mm) | 640 | 1050 | 820 |
| Precizia poziției de navigare (mm)* | ±5 | ±5 | ±5 | |
| Precizia unghiului de navigație (°)* | ±0,5 | ±1 | ±0,5 | |
| Viteza de navigare (m/s) | ≤1,5 | ≤1,5 | ≤1,8 | |
| Parametrii bateriei | Specificațiile bateriei (V/Ah) | 48/20 (fosfat de litiu-fier) | 48/40 (fosfat de litiu-fier) | 48/27 (fosfat de litiu-fier) |
| Durată de viață extinsă a bateriei (h) | 8 | 7 | 8 | |
| Parametri de încărcare automată (V/A) | 54,6/15 | 54,6/40 | 54,5/15 | |
| Timp de încărcare (10-80%) (h) | ≤1 | ≤2 | ≤2 | |
| Metoda de încărcare | Manual/Automat | Manual/Automat | Manual/Automat | |
| Configurații | Număr lidar | 2 (SICK nanoScan3 + C2 GRATUIT) sau 2 (H1 GRATUIT + C2 GRATUIT) | 2 (SICK nanoScan3) | 1 (SICK nanoScan3 Core) sau 1 (OLEILR-1BS5H) |
| Număr de fotoelectrice pentru evitarea obstacolelor în poziție joasă | 0 | - | 0 | |
| Detectarea încărcăturii | - | 〇 | - | |
| Buton de oprire de urgență | ● | ● | ● | |
| Vorbitor | ● | ● | ● | |
| Lumina atmosferică | ● | ● | ● | |
| Bară de protecție | ● | ● | ● | |
| Funcții | Roaming Wi-Fi | ● | ● | ● |
| Încărcare automată | ● | ● | ● | |
| Recunoașterea raftului | ● | ● | ● | |
| Rotire | - | - | ● | |
| Locație precisă cu cod QR | 〇 | - | 〇 | |
| Navigare prin cod QR | 〇 | - | 〇 | |
| Navigație cu reflector laser | 〇 | 〇 | 〇 | |
| Certificări | Compatibilitate electromagnetică/descărcări electromagnetice | - | ● | - |
| UN38.3 | - | ● | ● | |
Precizia navigației se referă de obicei la precizia de repetabilitate cu care un robot navighează către stație.
● Standard 〇 Opțional Niciunul
Afacerea noastră







